部署 Clio
https://github.com/MIT-SPARK/Clio
安装 ros
安装 ros-clio
原项目使用 virtualenv,目前测试下来可以使用 miniforge 虚拟环境(测试过 python 3.8、3.9)
apt install python3-rosdep python3-catkin-tools python3-vcstool初始化 clio 工作环境
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin init
catkin config -DCMAKE_BUILD_TYPE=Release
catkin config --skiplist khronos_eval默认情况下,Clio的依赖项之一 semantic_inference 将尝试针对NVIDIA TensorRT构建。Clio不需要这,如果系统上已经设置了CUDA,则在构建时可能会造成问题。可以在构建前通过运行catkin config -a -DSEMANTIC_INFERENCE_USE_TRT=OFF来禁用此功能。
下载 clio 并 build
cd src
git clone git@github.com:MIT-SPARK/Clio.git clio --recursive
vcs import . < clio/install/clio.rosinstall
rosdep install --from-paths . --ignore-src -r -y
cd ..
catkin build安装开放词汇集
pip install ~/catkin_ws/src/semantic_inference/semantic_inference[openset]安装 clio
pip install -e ~/catkin_ws/src/clio有部分包需要手动降级
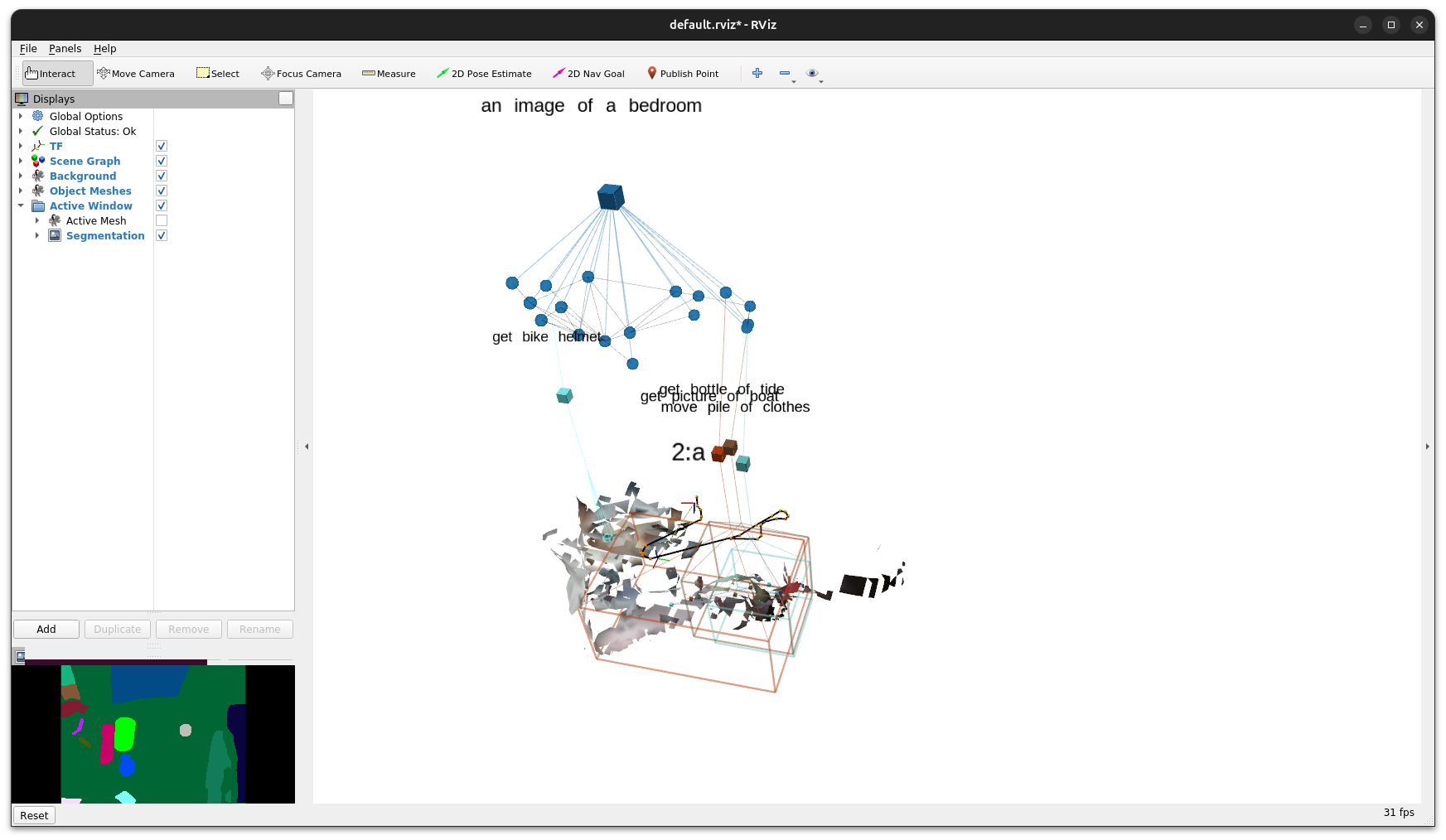
运行 clio-ros
source ~/catkin_ws/devel/setup.bashroslaunch clio_ros realsense.launch object_tasks_file:=/root/data/apartment/tasks_apartment.yaml place_tasks_file:=/root/data/apartment/region_tasks_apartment.yaml
roslaunch clio_ros realsense.launch object_tasks_file:=/root/apartment/tasks_office.yaml place_tasks_file:=/root/apartment/region_tasks_office.yamlrosbag play oid.bag --clock /camera_odom:=/dominic/forward/colmap_odom /camera_odom_depth:=/dominic/forward/depth/image_rect_raw /camera_odom_image:=/dominic/forward/color/image_raw